Introduction:
This week’s
activity brought an end to our land navigation exercises. We were tasked with
using everything we learned thus far in a game of paintball at the Priory land.
By applying a culmination of skills learned in previous weeks, we were required
to locate and navigate to the points throughout the course in the most efficient
manner possible. We used the week to
create new maps, including the point locations and off limit boundaries, as
well as develop a strategy for our team’s success. Each of the six teams were able to determine
their own course of action, making encounters very likely. This exercise provided a fun activity in which
we could hone our skills and show what we learned throughout the land navigation
section of our geospatial field methods class.
Study Area:
Once again
the study area for this week’s activity was the 112 sq acre Priory land purchased
by the University of Wisconsin Eau Claire in October of 2011. Figure 1 below
shows the location of the Priory from the UWEC campus. Having already navigated
this course, we were familiar with the terrain making it much easier to establish
a sense of direction.
Methods:
During week
1 of our land navigation project, we began preparations for compass/map
navigation. This traditional method
provides an effective means of travel without the reliance on technologies such
as the global positioning system (GPS). The
only elements required for this technique are distance and direction. The use
of a compass and a map provide you with the needed information to determine
direction, while a 100 meter pace count offers you the element of distance.
We began by
establishing our pace count using the TruPulse range finder, used in our
distance azimuth survey, to measure 100 meters. After measuring 100 meters, determining your
pace count is as simple as counting every other step from start to finish. My recorded pace count ended up being 65
steps; however, since this was a straight line path, on concrete, I decided to
add 10 paces to account for being in the woods and traveling in a less linear
path. Using the scale included on my maps, I can measure the map distance
between each point and associate it with my pace count to determine my ground
distance.
The second portion
of land navigation week one, involved using ArcMap to create the maps used during
the exercise. The only requirement for
these maps was that they use a UTM grid reference system. Since the points are being provided to us in
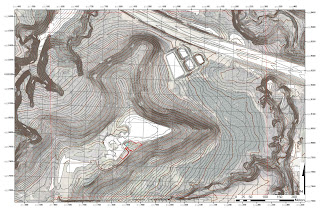
UTM, we have to use the same grid system to determine their location. I decided on using two maps, one with very
detailed contour lines to easily distinguish changes in relief (figure 2), and
the other showing a clear aerial photograph to distinguish changes in
vegetation (figure 3). As you can see in
figure 2, the major terrain features are made visible using 2 foot contour
intervals. Figure 3 shows the contrast between the different vegetation quite
clearly. For both maps, 50 square feet
grid intervals were used to keep them cluster free while plotting the points.
During the
second week of the land navigation activity, we put our maps and pace counts to
use using a traditional map and compass technique. Traditional land navigation
not only retracts from our reliance upon technology that often fails, it also
provides an accurate and efficient means of travel.
The first
part of compass/map navigation is plotting the coordinates of the course’s
points. These points were given to us in
six digit UTM coordinates, making them accurate to within 10 meters of the
point’s actual coordinates. Using the grid references on our map, made this
process as simple as aligning the first three digits with the x-axis and the
last three digits with the y-axis. Figure 4 shows our point locations marked on
our map, point 1B being the starting point.
After
plotting the coordinates, we determined the direction of travel by finding the
azimuths. An azimuth is simply the straight line direction between two points
with units in degrees or mils. The technique I used involved placing a military
protractor on each point and aligning its crosshairs parallel to the grid
lines. A straight edge can then be used to record the direction in degrees
found on the outside edge of the protractor (Figure 5).
The last
preliminary step before starting the course is to use the map’s scale to
determine the distances between each point. This distance in meters can then be
converted into your pace count so that your location on the map is known.
After all of
the points were plotted, the direction of travel determined, and distances
measured, we moved to our first course marker.
We began at the starting location and pointed our compass to our first
azimuth towards point 2B. Once each point was found, we simply rotated the
bezel on our compass to align it with the next azimuth. Using this simple,
traditional technique, was quite efficient in finding all six of our points.
The most difficult part of the process was walking in snow at times being two
feet deep (Figure 6).

Land
navigation part three involved using a global positioning system to find a different
set of points on the Priory course. This technique provided some advantages and
disadvantages for finding our points.
The advantages being that it allows us to track our movement throughout
the course using the track log feature, and it makes having a map less
necessary since it provides your locations coordinates. However, using a GPS also has disadvantages
such as reliance on batteries, it being subject to a harsh environment, and
strength of signal in dense vegetation.
For our GPS
land navigation exercise, we used a Garmin etrex GPS unit. Although somewhat
outdated, this unit is relatively inexpensive and useful for simple tasks such
as land navigation. By using at least
three satellites, a GPS triangulates your location on a three dimensional plane
in X, Y, and Z fields. This provides good locational data to be incorporated
within a GIS. After being given our
point coordinates, we activated the GPS track log and moved towards the first
point. Using the X and Y coordinates displayed on the GPS, we walked towards
our point coordinates. This technique was very slow, as we often found ourselves
walking out of our way to determine which direction we needed to go.
Once the
course’s points were found, we were able to upload our track log data to see
our route. Figure 7 shows my groups track log as we navigated our course. Right off the bat you can see our direction
got mixed up in the south west area near the parking lot.
After each
group uploaded their track logs, I imported the data into ArcMap. In figure 8
you can see that all 18 of the points were reached. By incorporating the time
data stored by the GPS, you can see which groups were more efficient in their
travel (Figure 9).
FIGURE
9 GROUPS ANIMATION
Results:
Having
learned the necessary skills for both traditional and GPS land navigation, our
final test was to travel to as many points as possible with the added element
of paintball. Using our experience in
the previous weeks, we recreated our maps showing off limits zones and the
necessary information ensuring our success.
Once again,
we used our GPS’s track log feature to record our routes; however, already
being familiarized with the course, we relied much more on terrain association
than the actual GPS coordinates. This provided a very efficient way of reaching
the points, while staying alert for the five other groups. In figure 10, you can see our route, along
with the other groups. Our routes meeting were often accompanied by an intense
firefight and a hasty retreat by one team or the other.
To accompany
this data, I created a time animation showing each groups travel throughout the
course. Figure 11 clearly shows where
groups converge on one another and a firefight occurs.
FIGURE
11 CLASS TRACKLOG TIME ANIMATION
Conclusion:
Using the
methods learned throughout the land navigation portion of our class, I feel
quite confident in my abilities to find feature locations using either, a
compass and a map, or a global positioning system. These skills can be used for various field
activities conducted by geographers, such as collecting feature data on a study
area.



































